Важное из теории
В передней подвеске велосипеда (амортизационной вилке) все очень просто: направление перемещение колеса прямолинейно и совпадает с осью амортизатора, расположенного в одной из ног вилки. В задней подвеске все куда сложнее.
Во-первых, траектория движения колеса не прямолинейна, а ближе к окружности. В подвесках типа VPP траектория и вовсе может быть особо вычурной, вплоть до S-образной. Во-вторых, продольная ось амортизатора чаще всего не только не соответствует движению колеса, но и вообще располагается под произвольным углом к основным рычагам подвески. В-третьих, сами рычаги, а также точки их крепления, невозможно расположить где хочется — от этого страдают характеристики подвески.
Все это приводит к тому, что задняя подвеска современного двухпод — веса — самая технически сложная его часть. Конструкторы бьются над совершенствованием каждой ее характеристики, выкраивая миллиметры и выверяя градусы. Рассматривать все характеристики — долгое и скучное и занятие, но с основными лучше все же познакомиться.
1. Траектория движения оси колеса. Почему-то многие считают, что этот параметр имеет первостепенную важность. Это не совсем так. Траектория движения влияет на «мягкость» обработки неровностей, а также изменение базы велосипеда — расстояния между осями переднего и заднего колес по ходу сжатия подвески. В большинстве случаев траектория движения оси колеса является результирующей характеристикой, полученной на выходе после выбора других характеристик. Тем не менее, почти все производители стараются сделать траекторию таковой, чтобы в начальный момент сжатия подвески ось заднего колеса двигалась или вертикально вверх, или с некоторым сдвигом назад, так отработка неровностей получается наиболее гладкой. Тем не менее, слишком увлекаться этим сдвигом нельзя, так как от этого страдает следующая характеристика.
2. «Рывок цепи». Возникает из-за увеличения расстояния между точками касания цепи к ведущей и ведомой звездам. При очень большом значении при сжатии подвески виртуальное удлинения цепи вызывает ее рывок назад, что выражается в повороте педалей против хода движения велосипеда. Интенсивность рывка зависит от конструкции подвески и текущей выбранной передачи (особенно актуально для передних звезд).
3. расположение мгновенного центра вращения задней подвески. От этого фактора напрямую зависит то, как будет вести себя велосипед при педалировании. Грамотно выбранный мгновенный центр вращения позволит «развязать» велосипед от действия подвески, то есть минимизировать влияние педалирование на работу подвески. В 4-рычажных схемах мгновенный центр вращения изменяет свое расположение по ходу сжатия подвески. С одной стороны, это добавляет головной боли разработчикам, а с другой — позволяет оптимизировать его размещение в наиболее деликатной зоне малых ходов подвески, критичной к раскачке при педалировании.
|
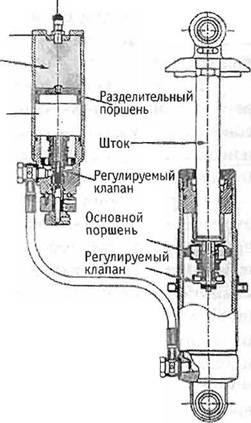
Клапан Шредера |
|
Компенсационная камера Газ |
|
Масло |
|
Рис. 3.92. Задний амортизатор с компенсационной камерой |
|
|
4. Характеристика сжатия. Представляет собой зависимость силы, действующей на ось колеса и/или шток амортизатора в зависимости от текущего значения хода подвески. Это одна из основных характеристик, задающих поведение подвески. Изменяя график характеристики сжатия, можно придавать подвеске линейную или, наоборот, прогрессивную работу, а также задавать режимы работы подвески на разных ее ходах. Кроме того, данная характеристика завязана на тип амортизатора. Пружинный амортизатор с полностью линейной собственной характеристикой требует одной характеристики сжатия подвески, а воздушный с прогрессивной собственной характеристикой — другой.
Все остальные характеристики кинематики имеют второстепенную значимость.