Управляемость велосипедом
Слегка разобравшись с устойчивостью, помыслим теперь и об управляемости. Положим, что байкер до руля не дотрагивается, катит себе «без рук». Устроим маленький эксперимент: поставим правильный велосипед вертикально на оба колеса и, держа его за раму, наклоним чуть в сторону. Мы увидим, что руль сам повернется в ту же сторону. Именно поэтому байкер, едучи без рук, успешно сохраняет равновесие и может поворачивать. Причина проста — она в конструкции передней вилки и рулевой колонки.
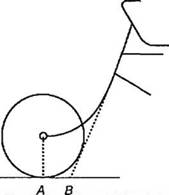
Есть две очень важные точки, от положения которых зависит характер байка: будет он управляем и устойчив или наоборот. Итак, это точка «А» — место контакта переднего колеса с дорогой и точка «В» — пересечение оси рулевой колонки с той же дорогой. Взаимное положение этих точек определяет, куда повернется руль при наклоне велосипеда, а так же курсовую
|
|
|
а) |
|
Рис. 5.6. |
|
|
|
б) |
устойчивость байка, его управляемость, стабильность на виражах и многое другое. Все велосипеды можно разделить на два типа: ВА и АВ (см. рис. 5.6).
Тип « АВ», у которого точка «А» контакта переднего колеса с дорогой расположена впереди точки «В» — оси вращения колеса (рис. 5.6а). Так как точка «А» служит местом приложения силы трения и лежит впереди оси вращения колеса «В», то велосипед при качении «без рук» будет мгновенно складываться пополам как ширма и с грохотом сыпаться на землю. Но и руками управлять велосипедом типа «АВ» тяжело — на вираже руль будет стремиться вывернуться наружу. Поэтому велосипедов типа «АВ» в магазинах не сыскать ни за какие деньги.
|
а) |
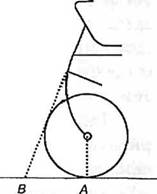
У типа «ВА» все наоборот: точка «А» лежит позади точки «В» (рис. 5.66), и сила трения стабилизирует переднее колесо в верном положении. При наклоне байка переднее колесо будет поворачиваться в сторону наклона само, без всяких рук. Велосипед типа «ВА» будет «въезжать» под уплывший в сторону центр тяжести и автоматически возвращаться в вертикальное положение, даже при отсутствии «руководящей и: направляющей роли» человека и велосипедиста. А на вираже байку надо только немного помочь, направить его в нужном направлении, и все будет хорошо!
|
|
|
б) Рис. 5.7. |
|
В) |
Из формулы (3) четко видно, что угол поворота руля, достаточный для восстановления равновесия на большой скорости, может стать недостаточным на малой скорости. И это тоже понятно, чем меньше скорость, тем сложнее управлять велосипедом «без рук».
|
|
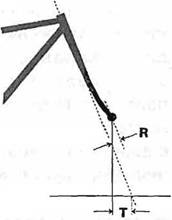
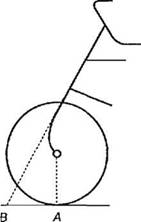
Теперь пару слов о форме передней вилки. Варианты, изображенные на рис. 5.7а и 5.76, дают нам слишком большое расстояние между точками «В» и «А», что приводит к курсовой «сверхустойчивости» велосипеда, а управляемость будет «ниже плинтуса». Рис. 5.8.
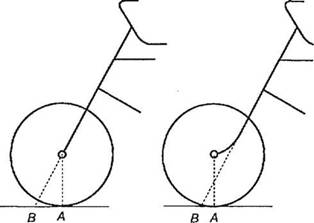
На байке с такой вилкой можно прекрасно катить по прямой, но вписаться в поворот на узкой лесной дорожке будет весьма затруднительно. Поэтому для уменьшения расстояния между этими точками вилку на велосипедах изгибают вперед (рис. 5.7в). Но если вилка прямая, то меняют ее наклон относительно оси рулевой колонки или смещают вперед «петухи» (дропауты), в которых крепится ось переднего колеса (рис. 5.76, 5.7в). Расстояние между осью рулевой колонки и осью втулки переднего колеса называют по-разному: и Rake, и Fork Offset или, в вольном переводе, наклон, смещение вилки. Величина смещения вилки обычно находится в пределах от 30 до 50 мм. Зная смещение вилки, угол наклона оси рулевой колонки и реальный диаметр колеса, легко можно подсчитать расстояние между точками «А» и «В». Это весьма важное расстояние называется Trail (след). У нас обычно переводят как «выкат» или «вылет» переднего колеса. В научной литературе иногда встречается термин «плечо устойчивости передней вилки» — очень точно, но немного длинно (рис. 5.8).
Иногда значение Trail можно найти в каталогах. Возникает вопрос, а зачем его считать? Разумный вопрос. Зная Trail, можно оценить устойчивость и управляемость велосипеда, выразить его числом, что иногда гораздо яснее и понятней, чем размахивание руками в попытке выразить свои впечатления на словах. Итак, для двухколесных велосипедов существует коэффициент курсовой устойчивости (Ку), который равен: Ky=[T/(G+T)]-100% (4), где G — база велосипеда, а Т — Trail. У нормальных велосипедов Ку лежит в диапазоне 7,5-4,8%, а минимальное значение Ку ~ 5% — у гоночных шоссейников. Большая строгость в управлении в сочетании с пониженной курсовой устойчивостью позволяет на максимальной скорости проходить по немыслимым траекториям и выигрывать доли секунды на каждом вираже (как, например, у современных истребителей, которые для лучшей маневренности делают принципиально неустойчивыми — без компьютера они летать не могут). При этом гонщик вынужден управлять велосипедом с большой точностью, дабы не ехать по крутой синусоиде, и не увеличивать и без того длинную дистанцию. У байков
ЬЪО
из одной линейки с увеличением ростовки (размер «А» на схеме — расстояние от каретки до середины горизонтальной трубы) возрастает и база, а чем больше база, тем хуже управляемость. Поэтому для улучшения управляемости и маневренности у байков с длинной базой Ку делают поменьше. Но это правило соблюдается не всегда, недорогие байки могут сильно различаться по управляемости. На малом будет трудно проехать по прямой, он все норовит вильнуть в сторону, а на большом — и вовсе не повернешь. У кросс-кантрийных хардтейлов обычно длина колесной базы 100-107 см, большой Ку ~ 7%, длинный вынос и узкий руль. Курсовая устойчивость велика, и пройти крутой поворот непросто, зато байк уверенно катит прямо по неровному грунту, и меньше надо тратить сил на управление. У двухподвесов для DH и фрирайда база обычно длинная, 110-117 см, что весьма полезно на крутых склонах, короткий вынос, широкий руль и несколько меньший Ку ~ 6,8-6,3% при пологой, в 64-65 градусов вилке. Там, где катят такие байки, бывает трудно пройти пешком. Широкий руль и пологая вилка уменьшают строгость управления и облегчают пилотаж на техничных участках с мощными камнями, корнями и колдобинами. Уменьшение Ку компенсирует удлинение колесной базы и улучшает управляемость.