Устойчивость, управляемость и руление
«Купите себе велосипед. Не пожалеете, если останетесь живы.» М. Твен, «Укрощение велосипеда»
Почему не падает двухколесный велосипед, не вполне понятно, особенно на первый взгляд. Площадь его опоры очень мала, даже если шины весьма широкие и слабо накачаны. Поставленный вертикально, он долго не простоит. Обычно он валится набок через 2-4 секунды, но, если его удачно толкнуть вперед, падение случится через 10-15 секунд. Именно этим байк решительно отличается от трехколесного велосипеда и четырехколесного автомобиля. Даже без управляющих действий человека движущийся велосипед гораздо устойчивей, чем неподвижный.
Управляться он может также по-разному, и не только поворотом руля. Если вспомнить езду «без рук», то становится понятно, что факторов, обеспечивающих устойчивость велосипеда, несколько. Рассмотрим главные. Но прежде, еще одно короткое замечание: у велосипеда существуют две устойчивости и одна управляемость. Первая устойчивость — это вертикальная, вторая — продольная, или курсовая устойчивость, а управляемость—только продольная (курсовая). Само собой, чем лучше продольная устойчивость, тем хуже управляемость, и наоборот. Сложность заключается во взаимосвязи этих трех важных параметров. Один влияет на другой, другой на третий и рассказать, положим, о вертикальной устойчивости, не упоминая продольную, затруднительно. Но в любом случае, каждому практикующему байкеру важно сохранить равновесие, или баланс и катить в правильном направлении.
Рз&Ио&есие
Равновесию на малой скорости[3] или даже стоя на месте, как лихо демонстрируют некоторые умельцы, помогает геометрия вилки и рулевой колонки (см. схемы I и III рис. 5.4 «Принципы баланса велосипеда»). Поворачивая руль, мы сдвигаем центральную линию велосипеда, проходящую через точки контакта с поверхностью переднего и заднего колес. Так мы подстраиваем ее под слегка сдвинувшийся в сторону центр тяжести (ЦТ) велосипедиста и его верного двухколесного коня. Балансирование на месте всем хорошо известно и знакомо — это сюрпляс. Подробно о полезных свойствах вилок и их влиянии на устойчивость можно посмотреть чуть ниже.
Но ведь велосипед — это вам не какой-нибудь «Харлей». Велосипедист весит гораздо больше, чем байк, на котором он сидит. Поэтому для сохранения равновесия в некоторых ситуациях, например, на узкой колее, тропинке, лыжне можно перемещать центр тяжести как вправо, так и влево, меняя положение тела велосипедиста относительно велосипеда. Нужно, как бы отталкиваясь от него в сторону, противополож-
|
|
|
Рис.5.1. |
|
р б) |
|
ную первоначальному отклонению, сохранять равновесие, продолжая неуклонное движение вперед. При этом более высокий ЦТ велосипедиста сильнее воздействует на общий баланс системы байкер — байк и дает больший контроль над положением и движением велосипеда. Еще один полезный способ движения корпусом при рулении рассмотрим ниже. |
fa&Ho&ecue Ьообш
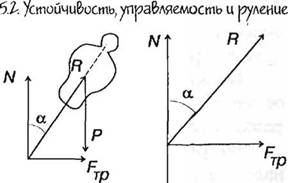
Представим себе обычный случай: велосипедист поворачивает со скоростью v по кругу с радиусом R. Для сохранения равновесия велосипедист должен наклониться на угол а от вертикали или, что тоже самое, на угол ф=90°- а от горизонтали, чтобы компенсировать центробежную силу (смотри рис. 5.1). Условия равенства сил приводят к известной еще со школы элементарной формуле ctg a=(v2/gR)=tg<p<jLi (1), где ц— максимально возможный в данный момент коэффициент сцепления шины с дорогой. Для реальной оценки его надо уменьшать на 20-25% по сравнению с многочисленными табличными значениями, g — ускорение свободного падения, равное 9,81 м/сек. Велосипедист поворачивает благодаря силам трения между дорогой и передним колесом. Если дорога скользкая или покрыта льдом, то контролируемый поворот становится затруднительным или невозможным. Вместо поворота может произойти занос переднего колеса, потеря равновесия и падение.
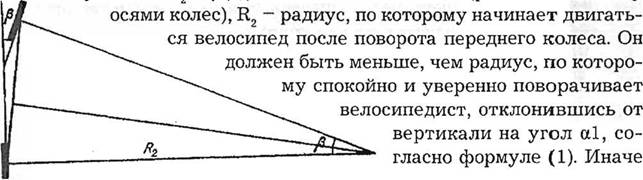
Пусть теперь велосипедист, спокойно катясь по прямой, ровной и гладкой дороге и любуясь проплывающим мимо пейзажем, случайно отклонился от вертикали на небольшой угол al. Чтобы не упасть, велосипедист поворачивает руль в сторону наклона велосипеда на угол р. Спрашивается, на какой угол надо повернуть руль, дабы не упасть? Для ответа достаточно посмотреть на рис. 5.2 и вспомнить любимую теорему синусов G=2R, sinp (2), где G — база велосипеда (расстояние между
|
|
|
G |
|
выправить равновесие не удастся. Теперь подставим |
|
Рис. 5.2. |
формулу (2) в формулу (1). И получим: sin|3 =(gGtgal/2v2) (3). Эта очень простая формула может рассказать много полезного.
Первое. Велосипедист, катящий со скоростью v и отклонившийся от вертикали на угол al, должен повернуть руль на угол больший или равный углу (3, который легко подсчитать по формуле (3).
Второе. Чем больше скорость велосипедиста, тем на меньший угол надо повернуть руль и для восстановления равновесия и для прохождения виража. То есть на большой скорости велосипедом управлять легче, чем на малой. И это хорошо известно всем, кто садился на велосипед.
Третье. Чем больше база велосипеда — G, тем на больший угол надо поворачивать руль, дабы восстановить равновесие или вписаться в поворот. И так же интуитивно ясно, что по узким, лесным извилистым дорожкам легче катить на велосипеде с малой базой.
Четвертое. Навык правильного поворота руля быстро становится автоматическим, подсознательным, и многие байкеры не подозревают, что, беззаботно катя по прямой, они все время поворачивают руль. Достаточно посмотреть на след, оставленный колесами велосипеда. Легко увидеть, что сравнительно прямой след от заднего колеса постоянно пересекается извилистым следом переднего. А это значит, что переднее колесо во время движения постоянно поворачивает то в одну, то в другую сторону, велосипед все время «въезжает» под регулярно падающего велосипедиста и, благодаря этому, сохраняет равновесие.
И, наконец, пятое. Если руль не поворачивается, если рулевая колонка, положим, по каким-то причинам заклинена, ездить практически нельзя (в современном понимании этого слова). Двухколесные самокаты начала XIX века, не имевшие рулевого управления, могли катить только по прямой.
|
|

И это приводит нас к любопытной аналогии между сохранением равновесия на велосипеде и удержанием швабры, бильярдного кия или авторучки («Паркер» с золотым пером, например) на раскрытой ладони (рис. 5.3). Действительно, как удержать кий? Сначала он стоит на ладони вертикально, а затем начинает отклоняться, и ладонь быстро перемещается в сторону наклона. Опора кия смещается, и он начинает наклоняться в другую сторону. Ладонь снова перемещается, и такое балансирование может длиться весьма долго.
То же самое делает и велосипедист. Но возникает естественный вопрос: чем проще балансировать — шваброй или авторучкой? Ответ не вполне очевиден, но, твердо освоив школьный курс на «хорошо», получить правильный результат несложно. Прежде всего, на что похожи стоящая швабра, авторучка и катящийся Р и с. 5.3. велосипед? Правильно! На перевернутый физический
|
Рис. 5.4. ПРИНЦИПЫ БАЛАНСА ВЕЛОСИПЕДА і н |
|
|

|
О Поворот налево |
|
Ось поворота на уровне земли |
|
|

|
Центральная линия |
|
через пятна контакта шин |
|
? Гироскопическая прецессия | Если вращающееся колесо t поворачивать налево, оно ] наклоняется строго вправо, но если его наклонять влево, оно поворачивается налево |
|
Реакция наклон вправо |
|
|
|
1/2 градуса |
|
1/2 дюйма |
|
Ось рулевой колонки на уровне земли |
|
Задний вылет |
|
|
|
Линия движения 1 |
|
Рисунки из статьи Tony Foale «Basik principles of balancing», 1985 г. |
|
Наклон |
|
|
|
Отклоненное колесо |
Вид сверху показывает, как эту линию шин можно сдвинуть в сторону поворачиванием руля из стороны в сторону.
Это очень важно для баланса на низкой скорости.
ВИД СБОКУ
|
ПЕРЕДНЕЕ КОЛЕСО |
/i*~-4 Вьілеі |
у Пятно контакта |
|
СВЕРХУ Ґ |
*V І у |
‘у шины с дорогой |
|
<0- …………………………….. 3 |
Ось рулевой колонки, на уровне земли
Боковая сила из-за угла скольжения
IV ВИД НА БАЙК СВЕРХУ 7-10 градусов
маятник. Вместо точки подвеса есть точка опоры. И такие перевернутые маятники всем хорошо знакомы — например, механический метроном, которым задают ритм при изучении музыки. Чем выше поднимают грузик на планке, тем больше период колебаний, и тем медленнее качается маятник метронома. А если грузик опустить вниз, к точке опоры, то период колебаний уменьшится, и маятник быстро-быстро зачастит[4]
Точно так ведет себя и любой предмет: чем он выше, чем больше расстояние от точки опоры до центра масс (центра тяжести), тем медленнее он отклоняется от вертикали на малый угол, и тем легче им балансировать или удерживать на нем равновесие. И тут вне конкуренции велосипед «Паук», у которого центр масс располагался на высоте около 2-х метров. Но падать с такой высоты было больно и опасно, и «Пауки» не выжили. Поэтому намозолившее глаза выражение «низкий устойчивый силуэт» справедливо только для трех или четырех колесных экипажей. Если так говорят о двухколесных велосипедах или мотоциклах, то это нонсенс и техническая безграмотность.